Problem Definition
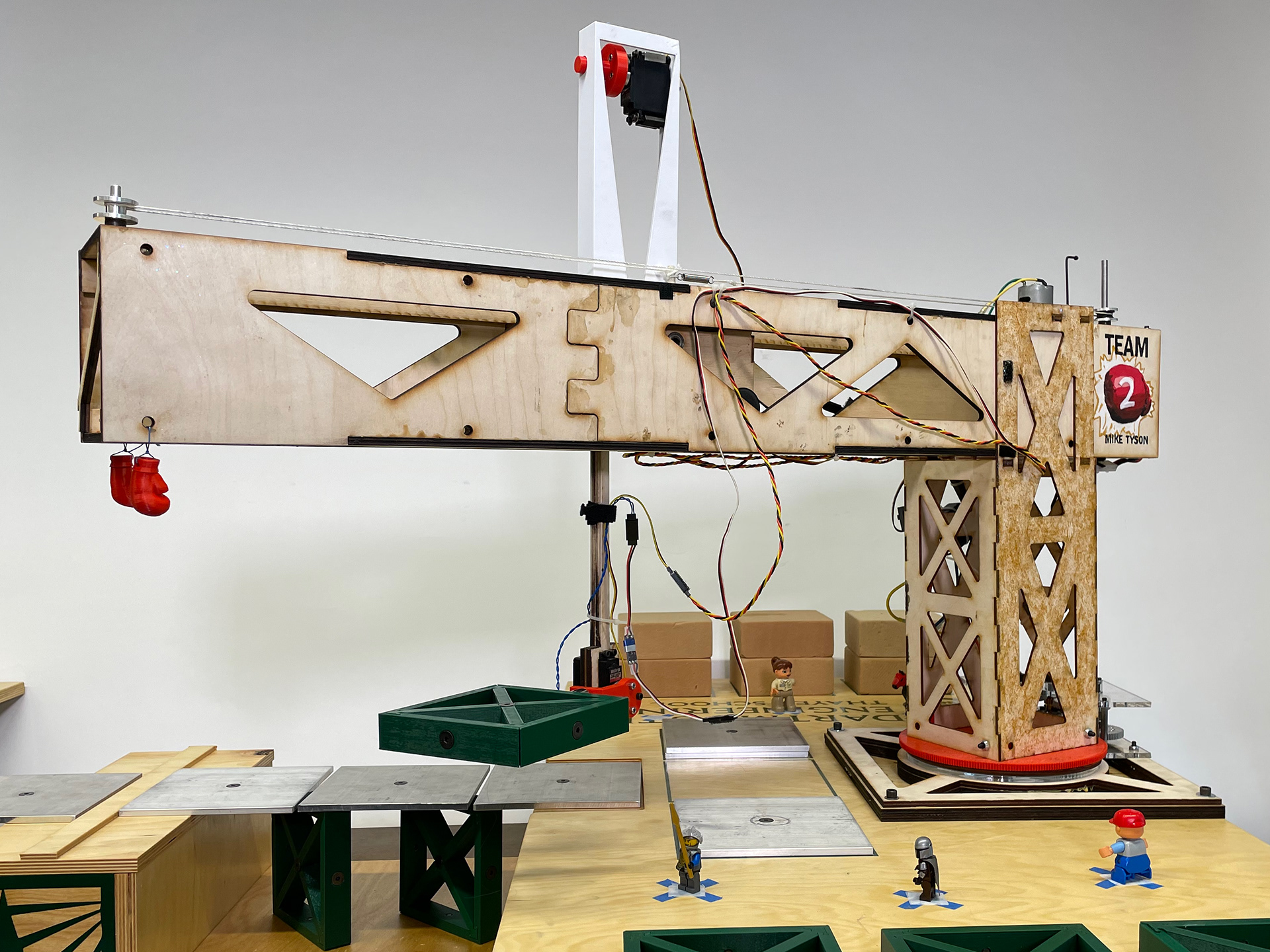
The objective of this project was to create an RC controlled machine that can move, grasp, transport, and position, and assemble given building materials into a bridge, allowing for a toy-excavator to cross the arena. Additionally, this task should be completed while minimizing the speed for completion, ensuring the safety of pedestrians, bot, and arena while using the least amount of building material use and minimizing the weight of the bot.
To meet the specifications of the project, our base needed to fit within the 12” x 12” x 12” starting cube, with all portions outside of that base having to be above 12”. Our machine should include one 3D printed PLA part, at least four machined aluminum parts using both the mill and lathe, and one laser cut part. It may utilize any kit parts (motors, servos, RC controllers, and gears), but no parts outside of the kit. The bot must be able to pick up and place PLA pylons, aluminum plates, and/or foam blocks to assemble a bridge. The bot must minimize safety risks to observers, the arena, and lego “pedestrians” at specific locations on the playing field.
On top of these specifications, we added specifications for our particular strategy. We wanted our bot to complete the bridge in under three minutes (we repeatedly completed the bridge in under 1.5 minutes), and to utilize as few bridge building blocks as possible during the demo (this was determined to be two PLA pylons and three aluminum plates). Moreover, the mechanisms in the machine should be simplified to the highest possible degree (combining or separating functions to minimize complication, and making parts that are easy to manufacture), and weight should be minimized (to under 10 kg).
By following these specifications, we set out to create a fast yet precise machine with simple and isolated components, where possible, and were able to score second in the competition.
Demo Video
This video demonstrates our robot at it's final form assembling a bridge from two PLA supports and three aluminum plates. Interface with these parts is accomplished with an electromagnet while all articulation of the magnet, arm, and crane are accomplished with a combination of servos and motors.
Final Class Report
This final report for our class details the project, our design process, implementation, and final project performance. The engineering drawings used to create the robot are included in the appendix at the end of the report.
Design Notebook
My design notebook details much of the ideation and analysis I completed during the project. It details my thought process, iteration of design, quick hand calculations, and group project work that allowed for our design to come to fruition.